
If you have ever been called“robotic” in your movements, chances are this is because your movements are seen as mechanical and dull.
While robots can perform actions such as jumping, grabbing onto things, and even dancing, they lack the finesse humans have when they do similar acts.
This is primarily due to robots lacking in bones, which is, as what has been taught to us in our Science classes, the framework of the body. Neither do they have connecting tissues, which allow more flexibility. Instead, they have gears and metal tubes that make their grip steady.
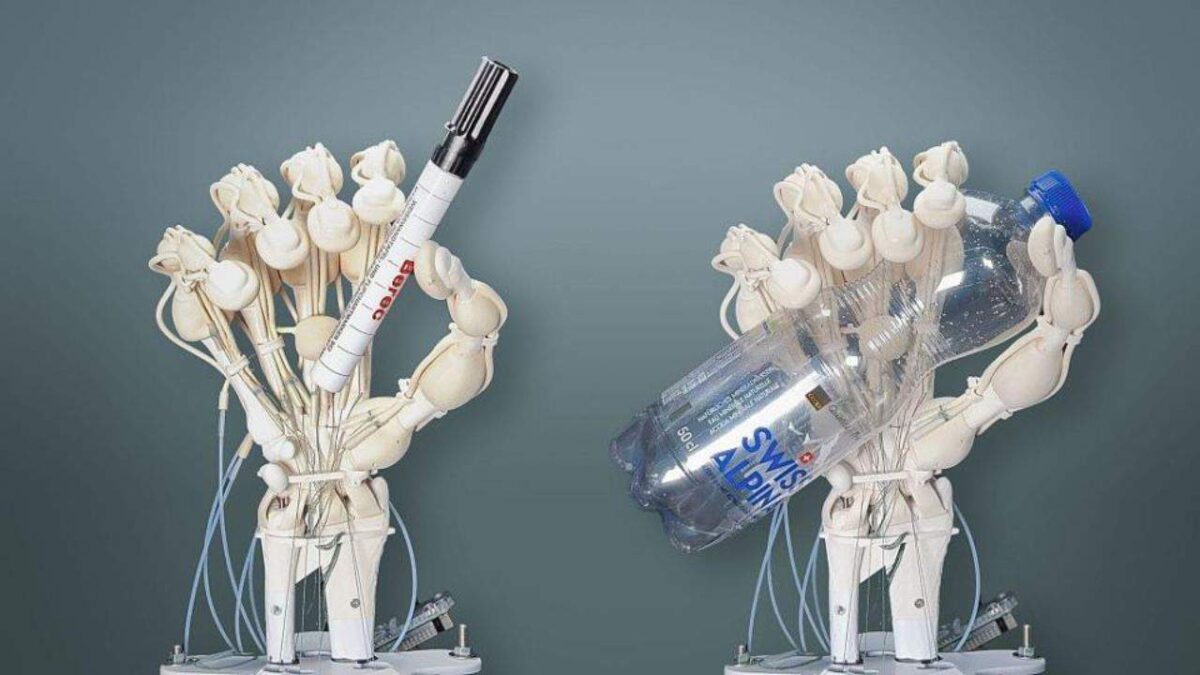
However, their movements may not have to stay stiff for long as a group of researchers from the Swiss Federal Institute of Technology (ETH), in collaboration with US-based team Inkbit, have found a solution to 3D print a robotic hand complete with human-like bones, ligaments, and tendons.
The team plans to 3D print the hand using a new 3D Inkjet deposition method referred to as vision-controlled jetting (VCJ.) The method that has been used nowadays has irregularities, which also limits the shapes that come into robotics.
We must understand that each printed layer needs mechanical planarization—the process by which uneven surfaces are smoothed through mechanical force. The researchers have observed that this limits the level of softness and the type of material chemistries that can be used.
The solidification is also rapid, so scientists don’t have enough time to create or modify different layers. The time-consuming and tedious process of putting all these components together and thoroughly testing the new robot afterward.
Fortunately, the new VCJ method can make a major difference with a process involving soft, slow-curing thiolene polymers. Katzschmann, one of the researchers, commented that these have very good elastic properties, returning to their original state much faster after bending than polyacrylates.
The VCJ works with a 3D printer to use a 3D laser scanner to check any irregularities once the component has been produced. After which, mechanical planarization will be replaced by printing in a way that makes up for any anomalies detected in the previous layer.
In a way, it works like some feedback that relies on detecting irregularities so that the real-time printed material will come out accurately. Moreover, this is less time-consuming because it lets them simultaneously print the robot’s hand. This means there is no need for a separate assembly of the structures.